Motora ZLTECH 3phase 60mm Nema24 24V 100W/200W/300W/400W 3000RPM BLDC ji bo makîneya çapkirinê








Motora Elektrîkî ya DC ya bê firçe (BLDC) motorek elektrîkê ye ku ji hêla dabînkirina voltaja rasterê ve tê hêz kirin û li şûna ku bi firçeyan mîna motorên DC-ya adetî, bi elektronîkî veguhezîne.Motorên BLDC îro ji motorên DC yên kevneşopî populertir in, lê pêşkeftina van celeb motoran tenê ji salên 1960-an vir ve gengaz bû ku elektronîkên nîvconductor hatin pêşve xistin.
Wekheviyên motorên BLDC û DC
Herdu celeb motor ji statorek bi magnetên daîmî an kulên elektromagnetîk ên li derve û rotorek bi pêlên kulikê yên ku ji hundurê de bi herika rasterast ve tê hêz kirin pêk tê.Dema ku motor bi herikîna rasterast tê xebitandin, dê zeviyek magnetîkî di hundurê statorê de çêbibe, an magnetên di rotorê de bikişîne an jî paşde bikişîne.Ev dibe sedem ku rotor dest bi zivirîna xwe bike.
Ji bo ku rotor di zivirîna xwe de bimîne komutatorek pêdivî ye, ji ber ku rotor dema ku ew li gorî hêzên magnetîkî yên di statorê de be raweste.Komutator bi domdarî herika DC-ê di nav pêlikan de diguhezîne, û bi vî rengî qada magnetîkî jî diguherîne.Bi vî rengî, rotor dikare heya ku motor bi hêz be dizivire.
Cûdahî motorên BLDC û DC
Cûdahiya herî berbiçav di navbera motorek BLDC û motorek DC ya kevneşopî celebê komutatorê ye.Motorek DC ji bo vê armancê firçeyên karbonê bikar tîne.Dezavantajek van firçeyan ew e ku ew zû li xwe dikin.Ji ber vê yekê motorên BLDC senzoran bikar tînin - bi gelemperî senzorên Hall - ji bo pîvandina pozîsyona rotor û panelek çerxê ku wekî guhêrbar kar dike.Pîvandinên têketina senzoran ji hêla panelê ve têne hilberandin, ku dema ku rotor dizivire bi rast wextê rast car dike ku biguhezîne.
Parametreyên
| Şanî | ZL60DBL100 | ZL60DBL200 | ZL60DBL300 | ZL60DBL400 |
| Dem | 3 Qonax | 3 Qonax | 3 Qonax | 3 Qonax |
| Mezinayî | Nema24 | Nema24 | Nema24 | Nema24 |
| Voltaj (V) | 24 | 24 | 48 | 48 |
| Hêza binavkirî (W) | 100 | 200 | 300 | 400 |
| Niha binirxîne (A) | 5.5 | 11.5 | 8.3 | 12 |
| Hêza herî bilind (A) | 16.5 | 34.5 | 25 | 36 |
| Torque ya binavkirî (Nm) | 0.32 | 0.63 | 0.96 | 1.28 |
| Peak Torque (Nm) | 1 | 1.9 | 3 | 3.84 |
| Leza binavkirî (RPM) | 3000 | 3000 | 3000 | 3000 |
| Hejmara Polan (Cot) | 4 | 4 | 4 | 4 |
| Berxwedan (Ω) | 0,22±10% | 0,59±10% | 0,24±10% | |
| Induktans (mH) | 0,29±20% | 0,73±20% | 0,35±20% | |
| Ke (RMS) (V/RPM) | 4.2x10-3 | 4.2x10-3 | 8.3x10-3 | 8,5x10-3 |
| Rotor Inertia (kg.cm²) | 0.24 | 0.48 | 0.72 | 0.96 |
| Rêjeya Torkê (Nm/A) | 0.06 | 0.06 | 0.09 | 0.12 |
| Dirêjahiya şaftê (mm) | 8 | 8 | 14 | 14 |
| Dirêjiya şaftê (mm) | 31 | 30 | 31 | 31 |
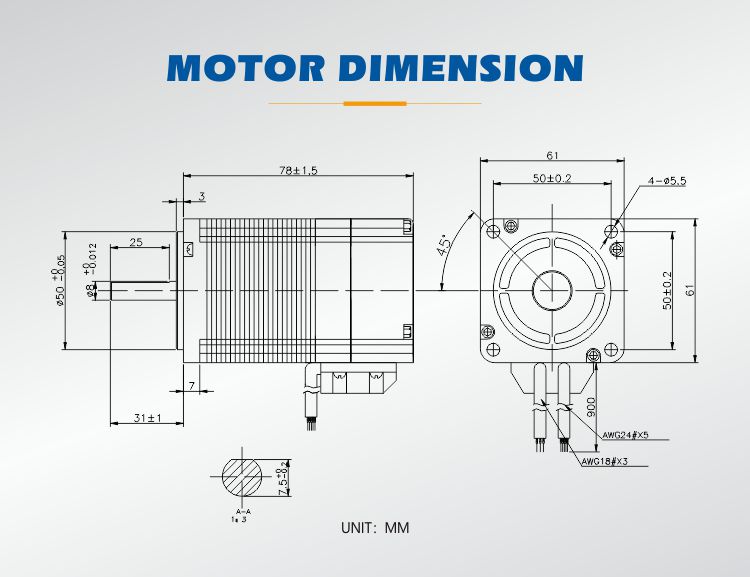
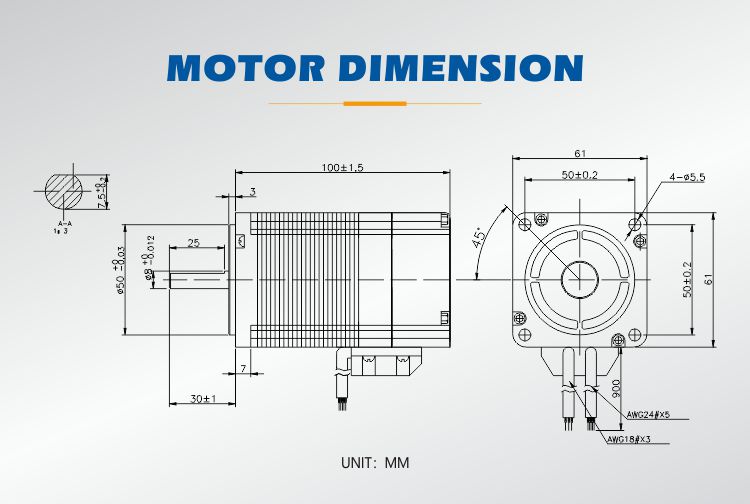
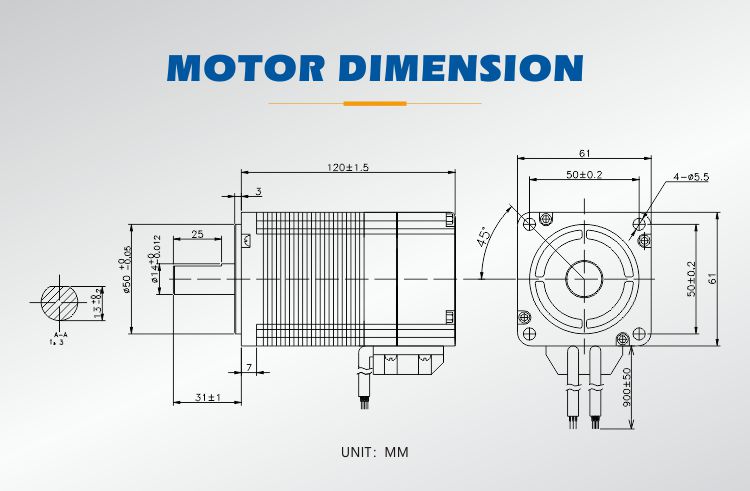
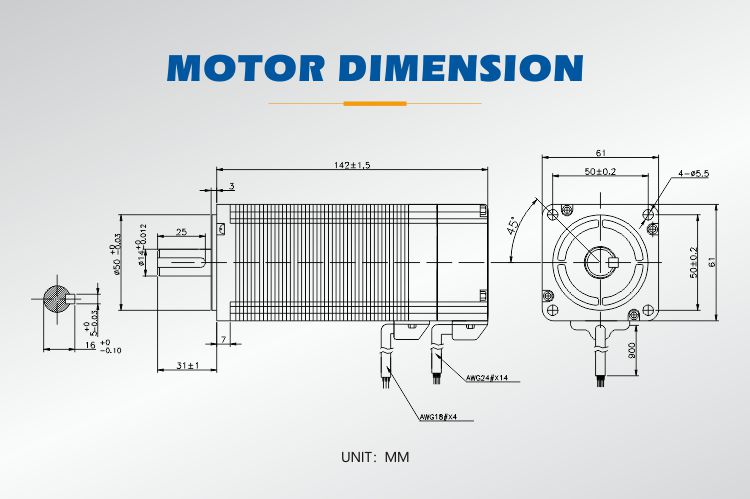
| Dirêjiya motorê (mm) | 78 | 100 | 120 | 142 |
| Giran (kg) | 0.85 | 1.25 | 1.5 | 2.05 |
| Adapted BLDC Driver | ZLDBL5010S | ZLDBL5015 | ZLDBL5010S | ZLDBL5015 |
Ebat
Bikaranînî

Bixçe

Amûra Hilberîn & Teftîşê

Qualification & Certification

Ofîs & Fabrîk

Hevkarî

Kategoriyên hilberan
-

DM4022 ZLTECH 24V-50V DC 0.3A-2.2A gavê gavê ...
-
M4040 ZLTECH 2 qonaxa 12V-40V DC 0.5A-4.0A firçeya...
-

ZLTECH Nema17 0.5/0.7Nm 18V-36V gavê yekbûyî...
-

ZLAC8030L ZLTECH 20V-60V 60A CANOPEN RS485 DC s...
-

ZLTECH 24V-36V 5A DC elektrîkê Modbus RS485 brus ...
-

ZLTECH 57mm Nema23 24VDC 1000-wrie loop girtî ...





